

Nema 23 Stepper Motor – 180 oz/in

£20.00 £16.67 (Ex. VAT)
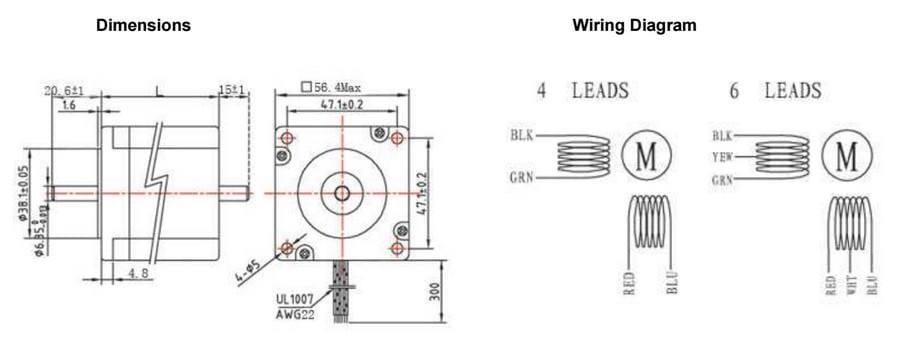
Dual Shaft Nema 23 Stepper Motor – 140 oz/in
Shaft Size 1/4 Inch.
200 Steps per revolution – 1.8 Degree Steps Rated Voltage 2.3 Current / Phase 2.8 Resistance / Phase .83 Inductance / Phase 2.2 Holding Torque Oz-In 140 Holding Torque g-cm 10100 (10.1kg) Qty Wires 4 Rotor Inertia 275 g-cm2 Weight .65 g Length 51mm Step Angle Accuracy ±5%(full step,no load Resistance Accuracy …
Out Of Stock - Please contact 3DTek